


碲半导体多功能感知融合集成系统
中国科学院半导体研究所半导体超晶格国家重点实验室王丽丽研究员团队和北京理工大学沈国震教授在半导体多功能异质异构集成系统领域取得突破。该团队利用碲半导体的独特的螺旋链结构和非对称的极化中心,通过纳米线取向设计和器件结构的优化,消除了系统对于位移控制的依赖,避免了热电和压电信号的相互干扰,实现了集成系统对多模态信息的精准识别并应用于触觉神经反馈回路系统的重构和元宇宙领域,该工作的优势是大大降低了系统的功耗、减少电路冗余。2022年10月10日,该研究成果以"Dual sensing signal decoupling based on tellurium anisotropy for VR interaction and neuro-reflex system application"为题发表于《自然?通讯》期刊(Nature Communications, 2022, 13, 5975)。
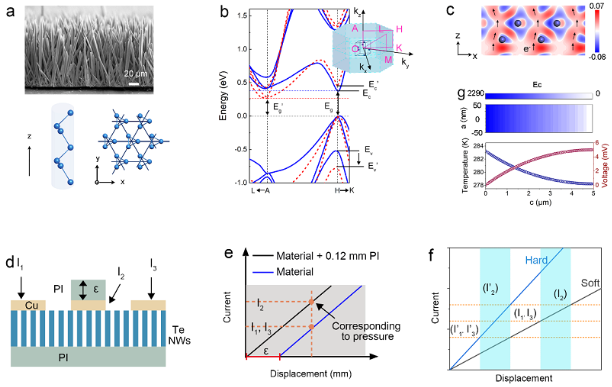
图1. 碲纳米线分子结构、能带结构和热电和压电模拟以及器件单元结构优化消除对位移控制的依赖。
随着微电子信息技术的蓬勃发展,对多功能集成系统的信号采集和处理提出了更高的要求。目前,柔性半导体传感器已经可以实现单一功能的感知,包括光、声、力、温度、生化信号等,然而与单一功能器件相比,多模态感知融合在评估人体健康状态和提高疾病识别精度方面具有明显优势。在传统的多模态感知系统中,不同信息的获取主要是通过将各种传感器集成从而采集不同信号,这会产生较大的功耗和电路冗余。因此,通过设计新型的器件结构、提出新的传感机理来实现单个传感器件对外部复杂信息的感知和识别是非常重要的。传统半导体碲由于独特的螺旋链结构、较低的热导、较高的载流子迁移率以及非对称的极化中心,是多功能器件的优选材料。通过器件结构的优化消除了系统对于位移控制的依赖,使其更符合人体神经控制规律。通过将系统与柔性电极相连,完成了触觉神经反馈回路系统的重构,实现了其在智慧医疗领域的潜在应用(图2)。
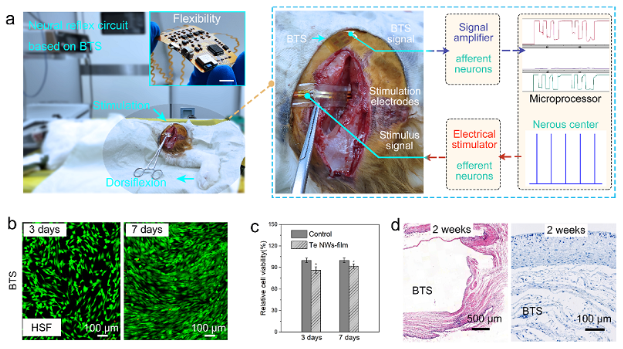
图2. 碲基多模态感知融合构建神经反馈回路系统。
此外,系统可以将导热和弹性模量两种信号结合,通过机器学习训练后实现不同物体的材质识别。基于这种特性,王丽丽团队还尝试了将系统应用到元宇宙领域,将现实世界中的物体映射到虚拟世界中,解决了目前VR手套主要功能是控制方向的弊端,实现了“人机物”三元融合(图3)。该工作的完成也是我们初步把精准医疗和VR系统结合在一起,目的是将元宇宙应用到智慧医疗信息技术之中。
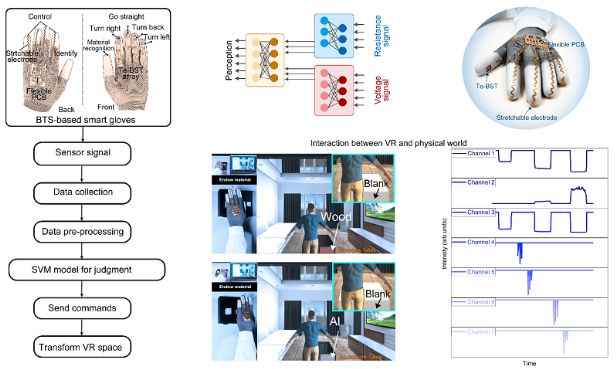
图3. 碲基多模态感知融合集成系统在元宇宙中实现“人-机-物”的应用。
上述研究工作第一作者为半导体所博士生李林林,通讯作者为半导体所王丽丽研究员和北京理工大学沈国震教授。该研究得到了中科院高层次人才项目、国家自然科学基金和中科院战略先导项目的经费支持。
来源:半导体学报

